单选题
ESP32主控板通过I2C协议修改姿态传感器MPU6050的陀螺仪量程数据,MPU6050的地址为0x68,陀螺仪量程的寄存器地址0x1B,更新后的量程数据为0B1100,下列选项中,程序正确的是?( )
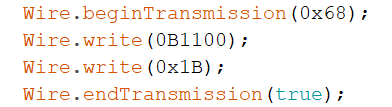
A
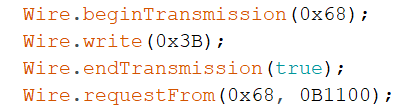
B
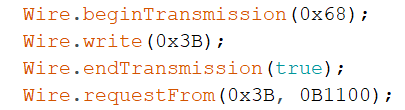
C
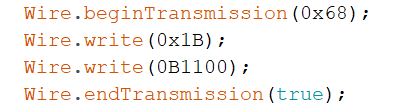
D