单选题
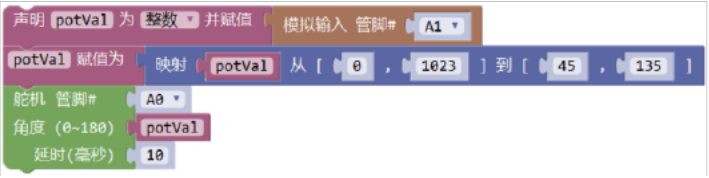
Arduino UNO 或 Nano 主控板,通过电位器旋转控制舵机的角度,程序运行下
列表达不正确的是?
A
电位器连接在 A1 引脚,舵机连接在 A0 引脚。
B
电位器从一端旋转至另外一端时,舵机的角度在 45 度和 135 之间变化。
C
当电位器转动到中间位置时,舵机停留在 45 度。
D
程序中分别通过变量 potVal 保存电位器的返回值和映射后的角度。