MPU6050姿态传感器中,用于获取角速度原始数据的传感器单元是?
Accelerator
Gyroscope
DMP
SDA&SCL
在TCP/IP通信中,率先发起通信请求的是?
主设备
从设备
服务器
客户端
MPU6050姿态传感器获取的原始数据,经过数据融合,获得传感器的姿态角,下列选项中,不属于姿态角的是?
俯仰角
偏航角
滚转角
角速度
MPU6050姿态传感器角速度传感器单元可以设置如下不同的量程,其中测量精度最低的量程是?
250°/s
500°/s
1000°/s
2000°/s
PID控制可以根据需要,进行多种组合,其中必须包含的控制是?
比例控制
积分控制
微分控制
闭环控制
IPV4 和IPV6的地址长度的位数分别是?
16和32
16和64
32和64
32和128
在TCP/IP通信中,通过IP地址+端口来区分不同的服务,通常端口80对应的服务是?
远程登录
未加密文本通信
Web服务
域名解析
关于I2C串行通信SDA和SCL的电路连接,下列说法正确的是?
仅SDA数据线通过上拉电阻连接到VCC
仅SCL数据线通过上拉电阻连接到VCC
SDA和SCL数据线均通过上拉电阻连接到VCC
SDA和SCL数据线均通过下拉电阻连接到GND
下列命令中,用于显示当前计算机的网络连接信息的命令是?
regedit
msconfig
ping
ipconfig
ESP32 for Arduino 提供的WiFi类库的成员函数WiFi.begin()的功能是?
以STA模式连接到AP
返回softAP的IP地址
创建一个接入点,并设置SSID和密码
启动web服务器
HTML文档中,标签的作用是?
标记网页的开始和结尾
标记网页头部的开始和结尾
标记网页主题的开始和结尾
标记网页段落的开始和结尾
关于MPU6050姿态传感器获取的角速度原始数据,下列说法正确的是?
获取的角速度数据就是当前状态的瞬时角速度
获得的角速度数据乘以当前量程后才是当前状态的瞬时角速度
获得的角速度数据除以当前量程后才是当前状态的瞬时角速度
以上都不对
SPI通信中,用于从机选择的数据线为?
SCLK
MOSI
MISO
SS
ESP32 for Arduino的I2C类库的下列成员函数中,requestFrom()成员函数的功能是?
将向从设备发送的数据加入到发送队列
初始化I2C
主设备将数据发送给从设备
主设备从从设备读取数据
I2C总线上的器件有主设备和从设备之分,通信时,负责启动和终止数据传送的是?
仅主设备
仅从设备
主设备和从设备同时发起
主设备和从设备随机发起
下图是三相反应式步进电机工作示意图,按照从左到右的图示,对应的通电方式是?
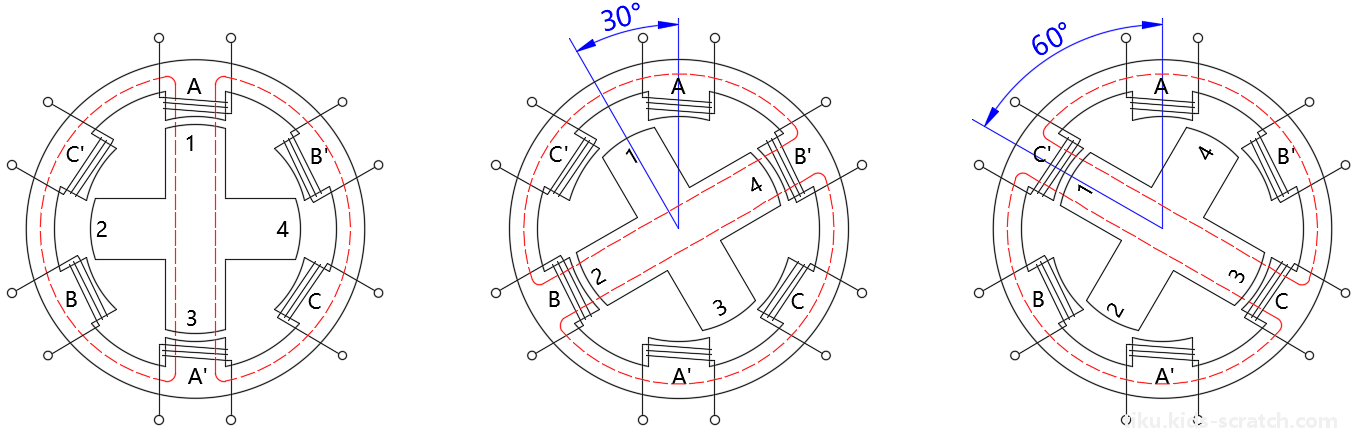
三相单三拍
三相双三拍
三相单双三拍
三相单双六拍
下列步进电机结构分类中,当前广泛使用的步进电机属于?
无刷式步进电机
反应式步进电机
永磁式步进电机
混合式步进电机
TCP/IP协议四层模型中,最底层的是?
网络接口层
传输层
网络层
应用层
ESP32 for Arduino的I2C类库的下列成员函数中,用于将从设备地址加入到发送数据队列的成员函数是?
Wire.begin()
Wire.beginTransmission()
Wire.endTransmission()
Wire.requestFrom()
近日,华为公司发布了面向AI时代的基于微内核的全场景分布式OS,其名称为?
安卓
麒麟
鸿蒙
红旗
关于步进电机,以下说法中不正确的有?
步进电机转动通过电脉冲信号控制。
步进电机转动的速度与脉冲频率成正比。
步进电机实现精确位移和定位的原因是采用来闭环控制。
步进电机运转时,会产生误差累计。
以下属于串行通信的有?
UART
I2C
SPI
USB
关于I2C通信,下面说法正确的是?
I2C通信空闲时,数据线SDA和时钟线SCL总是处于高电平状态。
I2C通信是串行通信。
I2C通信中从设备都有一个唯一的地址。
I2C通信是一种半双工通信方式。
在浏览器中,输入如下数据,可以访问到网页的是?
域名
IP地址
统一资源定位符URL
网页内容
ESP32主控板所支持的组网模式有?
STA
AP
STA+AP
Server+Client
SPI是串行全双工通信。
正确
错误
TCP/IP协议是指TCP协议和IP协议。
正确
错误
Web服务采用的是发布/订阅模式。
正确
错误
可以采用细分控制器设定步进电机每个脉冲的转动角度。
正确
错误
SPI通信由主设备和从设备组成,每个从设备有一个唯一的地址。
正确
错误