下列有关SPI通信描述错误的是?
SPI是同步通信
SPI是全双工通信
SPI是串行通信
SPI通信中,每个从设备有唯一地址
MPU6050姿态传感器中,Accelerator传感器单元用于获取?( )
加速度原始数据
角速度原始数据
姿态角原始数据
位移原始数据
TCP/IP协议四层模型中,与最终用户直接接触的是?
网络接口层
传输层
网络层
应用层
关于I2C串行通信,下列说法不正确的是?( )
I2C总线上的器件有主设备和从设备之分
启动数据传送由主设备发起
终止数据传送由从设备发起
I2C通信中从设备都有一个唯一的地址
MPU6050姿态传感器获取的原始数据,经过数据融合,获得传感器的姿态角,其中表示传感器上下角度变化和左右角度变化的姿态角分别是?( )
俯仰角 滚转角
偏航角 俯仰角
滚转角 偏航角
俯仰角 偏航角
客户端发送HTTP请求的方法中,用于向服务器发送索取数据请求的方法是?( )
GET
PUT
POST
PATCH
下列程序通过WiFi类库提供的成员函数,将当前ESP32设置为AP,建立WiFi,程序中[ ]所对应的成员函数是?( )
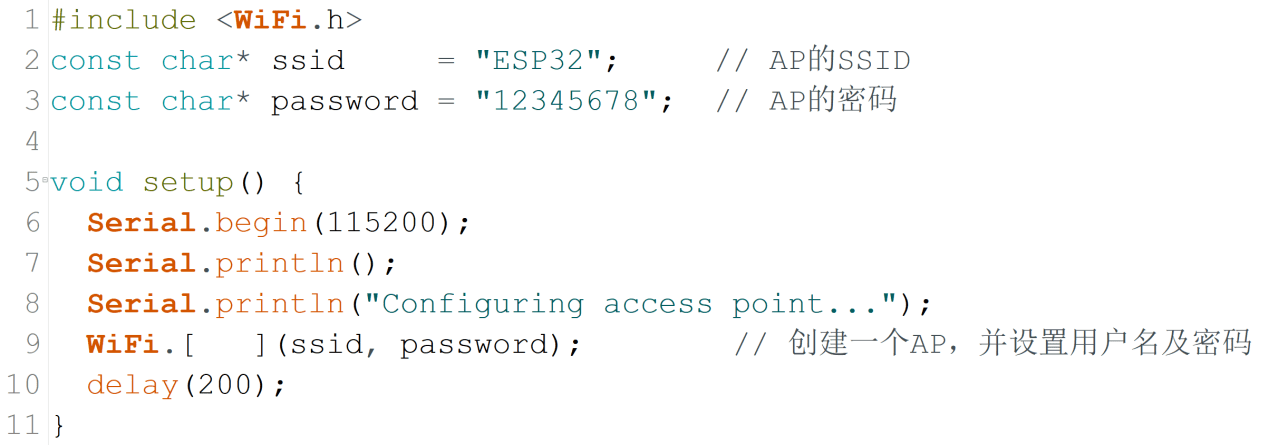
begin
softAP
connect
softAPIP
在TCP/IP通信中,率先发起通信请求的是 ?( )
主设备
从设备
服务器
客户端
HTML文档中,<head>标签的作用是?( )
标记网页的开始和结尾
标记网页头部的开始和结尾
标记网页主题的开始和结尾
标记网页段落的开始和结尾
I2C串行通信空闲时,下列有关SDA和SCL数据线的电平说法正确的是?( )
两者均为高电平
两者均为低电平
SDA为低电平,SCL为高电平
SDA为高电平,SCL为低电平
ESP32 for Arduino的I2C类库的下列成员函数中,用于指定从设备地址,并将地址加入到发送数据队列的成员函数是 ?( )
Wire.begin()
Wire.beginTransmission()
Wire.endTransmission()
Wire.requestFrom()
IPv6的地址长度是IPv4地址长度的?( )
2倍
4倍
8倍
16倍
SPI通信中,有关MOSI数据线描述正确的是?( )
从机选择线
串行时钟线
用于从机向主机发送数据
用于主机向从机发送数据
下列命令中,可以用于查看当前计算机IP配置的命令是?( )
ipconfig
msconfig
ping
Regedit
步进电机类库AccelStepper的成员函数中,用于设定梯形加减速中恒定转速的成员函数是?( )
setMaxSpeed()
setSpeed()
runSpeed()
setAcceleration()
在浏览器中,输入如下数据,不能访问到网页的是?( )
域名
IP地址
统一资源定位符URL
端口号
PID控制中P控制是指?( )
比例控制
积分控制
微分控制
开环控制
I2C串行通信,下列关于SDA引脚说法正确的是?( )
SDA传送时钟信号
SDA传送数据信号
SDA可以同时双向传送
SDA上的数据信号只能单向传送
下列步进电机结构分类中,当前广泛使用的步进电机属于?( )
无刷式步进电机
反应式步进电机
永磁式步进电机
混合式步进电机
ESP32主控板和OLED1306通过I2C进行数据交互,ESP32主控板和OLED1306分别为?( )
主设备 从设备
主设备 主设备
从设备 从设备
从设备 主设备
PID控制器常用的组合有?( )
PI
PD
PID
ID
有关TCP/IP协议下列说法正确的是?( )
TCP/IP协议是一系列协议家族的统称
TCP/IP协议包含了TCP协议和IP协议
TCP/IP四层模型分别是:应用层、网络层、传输层、网络接口层
TCP/IP协议当前Internet的基础协议
关于步进电机,如下描述正确的是?( )
步进电机的角位移量和电脉冲数成正比
通过改变电脉冲的频率,可实现步进电机速度的调节
在不丢步的情况下,步进电机的误差不会长期累积
步进电机可用于开环系统中作为执行元件
ESP32主控板提供的WiFi工作模式有?( )
STA
AP
STA+AP
Server
SPI串行通信一般由如下数据线组成?( )
MOSI
MISO
SCLK
SS
通常情况下,Web服务的端口号是80。
正确
错误
最后一个IPv4地址,已于2019年分配完毕。
正常
错误
ESP32芯片集成了WiFi和双模蓝牙功能。
正常
错误
SPI通信的时钟频率可以在初始化时设定。
正常
错误
步进电机的步距角是每改变一次通电方式,转子所转动的角度。
正常
错误