下列程序为将ESP32设置为STA模式的部分程序,程序第8行方框所对应的程序是?( )
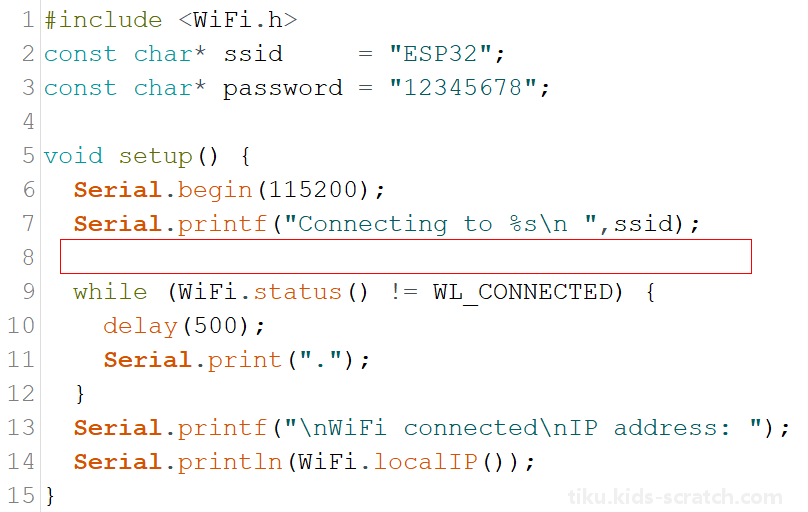
WiFi.softAP(ssid, password);
WiFi.begin(ssid, password);
server.softAP(ssid, password);
server.begin(ssid, password);
HTML文档中,用于表示网页主体的标签是?( )
<title>
<head>
<body>
<html>
MPU6050姿态传感器获取的姿态角,其中滚转角是?( )
Pitch
Yaw
DMP
Roll
IP地址110.242.68.66的表示形式属于?( )
IPV4
IPV6
服务器
接入端
ESP32主控板向MPU6050姿态传感器写入数据,程序如下,第5行方框内对应的程序是?( )
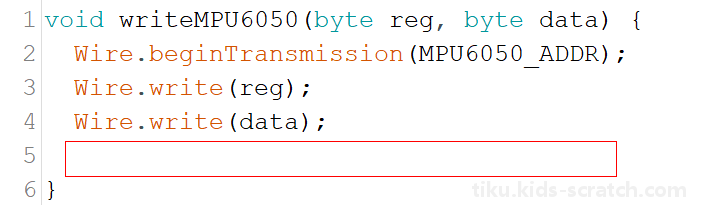
Wire.read()
Wire.end()
Wire.endTransmission();
Wire.requestFrom(MPU6050_ADDR,1)
SPI通信,主设备向从设备发送时钟信号的数据线名称是?( )
SCLK
MOSI
MISO
SCL
I2C串行通信,用于传送数据的是?( )
SDA数据线
SCL时钟线
MOSI
MISO
HTTP请求报文头部的结束符是?( )
回车符
换行符
回车符+换行符
仅回车符+换行符
ESP32 for Arduino SPI类库成员函数SPI.begin()的功能是?( )
设置数据的传送方式
设置数据的传送时钟频率
设置时钟的模式
初始化SPI接口
TCP/IP四层模型中,用于转换和传送物理二进制信号的是?( )
应用层
传输层
网络层
网络接口层
通常情况下,网页浏览所采用的传输层协议是?( )
TCP
UDP
FTP
POP3
执行如下程序,在串口监视器输入框输入“123+456”后,点击【发送】,串口监视器窗口显示的内容是?( )
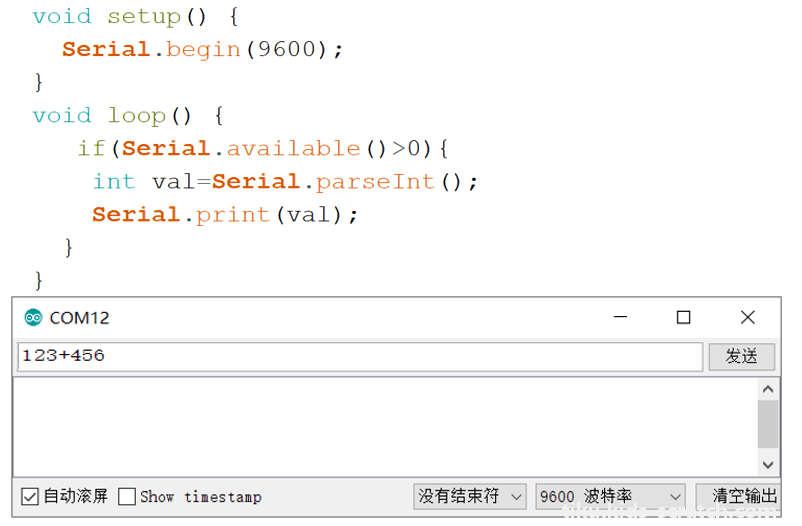
123
456
579
123456
一台拥有IP地址的主机,通过“IP地址+端口号”来提供多种服务,通常web服务所对应的端口是?( )
21
53
80
110
ESP32 for Arduino I2C类库的下列成员函数中,用于主设备向从设备发送读取数据请求的成员函数是?( )
Wire.begin()
Wire.write()
Wire.read()
Wire.requestFrom()
下列选项中,关于命令ipconfig,说法正确的是?( )
列出当前可用的网络连接
查看当前计算机配置
检查计算机是否连通到外部WiFi
查看当前计算机的IP配置
ESP32 for Arduino 所提供的WiFi类库功能全面,下列选项中,成员函数softAP()描述正确的是?( )
创建一个STA,并连接到SSID。
创建一个softAP,并设定SSID和密码。
返回softAP的IP地址。
启动Web服务器。
对于如下图所示的三相步进电机,当采用三相单三拍通电方式时,其步距角是?( )
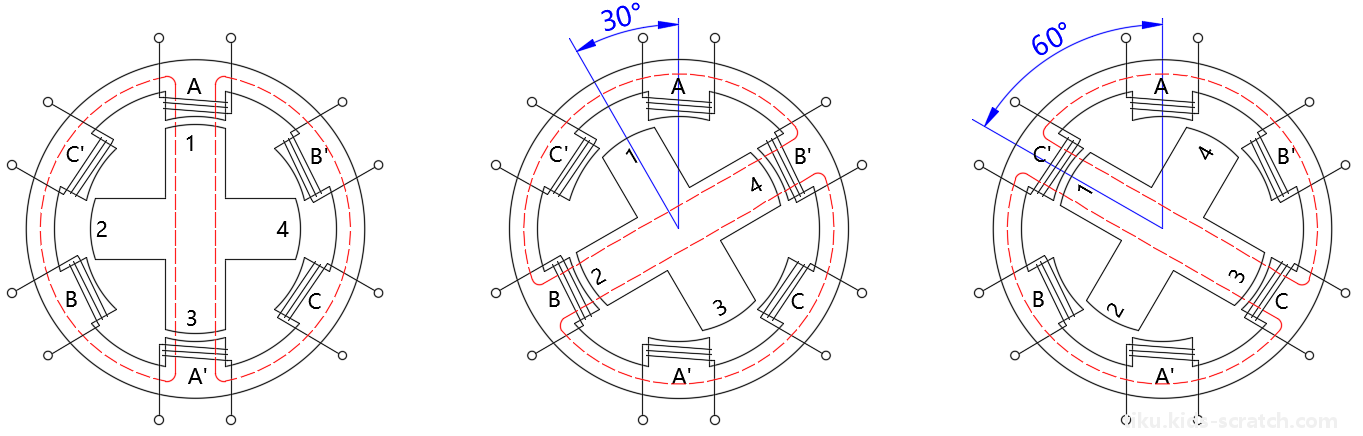
15度
30度
45度
60度
MPU6050姿态传感器中,用于获取转动角速度的传感器单元是?( )
加速度传感器
陀螺仪
DMP
磁力计
步进电机AccelStepper类库的成员函数中,成员函数run()功能描述正确的是?( )
启动步进电机,并以设定的速度值恒定转动。
启动步进电机,并以设定的加速度和最大速度值转动。
设定步进电机的最大速度。
设定步进电机的加速度。
关于I2C串行通信,下列说法错误的是?( )
I2C总线有几种不同速率的工作模式
一条I2C总线上可以连接多个设备
I2C是同步通信
I2C是全双工通信
下列选项中,属于全双工通信的是?( )
UART
I2C
SPI
蓝牙
下列选项中,ESP32 WROOM模组所能提供的通信方式有?( )
WiFi
蓝牙
UART
SPI
MPU6050姿态传感器角速度的量程有?( )
250°/s
500°/s
750°/s
1000°/s
下列选项中,常用的PID控制器有?( )
P控制
PI控制
PD控制
PID控制
使用手机进行网页浏览时,下列说法错误的是?( )
手机端率先发出请求信息
服务器端率先发出请求信息
手机端和服务器端同时发起请求信息
手机端和服务器端轮询发起请求信息
IPV6地址用字母和数字表示,用冒号分隔。( )
正确
错误
一般情况下,步进电机采用开环控制,但不会产生累计误差。( )
正确
错误
当采用SPI通信时,ESP32主控板通过地址和不同从设备进行通信。( )
正确
错误
当两块ESP32主控板通过WiFi连接时,两块主控板均工作与STA模式。( )
正确
错误
PID控制器中,D控制的作用是消除振荡,改变响应的速度。( )
正确
错误