IP主机中提供Web服务所对应的端口号是?
20
21
80
404
MPU6050姿态传感器中,用于获取转动角速度的传感器单元是?
Accelerator
Gyroscope
DMP
Magnetometer
当前使用的IPV4版本的IP地址由几段组成?
4
8
16
32
关于I2C串行通信SDA和SCL的电路连接,下列说法错误的是?
SCL传送时钟信号
SDA传送数据信号
SDA和SCL数据线均通过上拉电阻连接到VCC
SDA和SCL数据线均通过下拉电阻连接到GND
HTML文档中,用于标记网页开始的标签是?
<title>
<head>
<body>
<html>
ESP32 for Arduino SPI类库的成员函数中,SPI.begin()的作用是?
初始化SPI接口
设置数据在总线上的传送方式
设置数据在总线上的传送时钟频率
设置时钟模式
SPI通信,下列引脚中,用于从设备选择的数据线为?
SDA
MOSI
SCLK
SS
下列命令中,用于检测WiFi是否连通的命令是?
regedit
msconfig
ipconfig
ping
ESP32 for ArduinoI2C类库的下列成员函数中,用于从从设备读取数据的成员函数是?
Wire.begin()
Wire.write()
Wire.endTransmission()
Wire.requestFrom()
I2C串行通信总线空闲时,SDA和SCL的电平状况分别是?
SDA为低电平,SCL为高电平
SDA为低电平,SCL为低电平
SDA为高电平,SCL为低电平
SDA为高电平,SCL为高电平
TCP/IP协议四层模型中,负责传输应用层数据包的是?
网络接口层
传输层
网络层
应用层
ESP32 for Arduino 提供的WiFi类库成员函数中,具有创建一个接入点,并设置SSID和密码功能的成员函数是?
WiFi.softAP()
WiFi.begin()
WiFi.softAPIP()
WiFi.localAP()
使用类库AccelStepper控制步进电机的位置,下列类库的成员函数中,移动到相对与初始基准位置的目标位置的成员函数是?
distanceToGO()
runSpeed()
moveTo()
move()
ESP32主控板向MPU6050姿态传感器写入数据,程序如下,方框内对应的程序是?( )
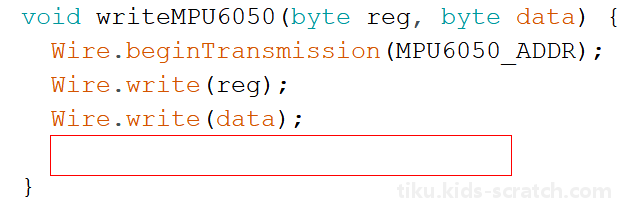
Wire.read()
Wire.write()
Wire.endTransmission()
Wire.requestFrom()
SPI通信协议是?
同步、全双工通信协议
同步、单工通信协议
异步、全双工通信协议
异步、单工通信协议
当ESP32主控板连接到路由器,此时ESP32主控板的工作模式是?当ESP32主控板连接到路由器,此时ESP32主控板的工作模式是?
STA模式
AP模式
服务器模式
响应模式
关于步进电机,以下说法中错误的是?
步进电机转动通过脉冲信号控制
步进电机转动的速度与脉冲频率成正比
步进电机一般采用开环控制
步进电机运转时,会产生误差累计
关于MPU6050姿态传感器加速度量程的说法正确的是?
加速度量程越大,返回的测量值精度越高。
通过加速度不能解析出姿态角。
加速度的返回值是16bit的无符号数。
加速度的量程可以根据需求设定。
对于如下图所示的三相步进电机,当采用三相双三拍通电方式时,其步距角是?( )
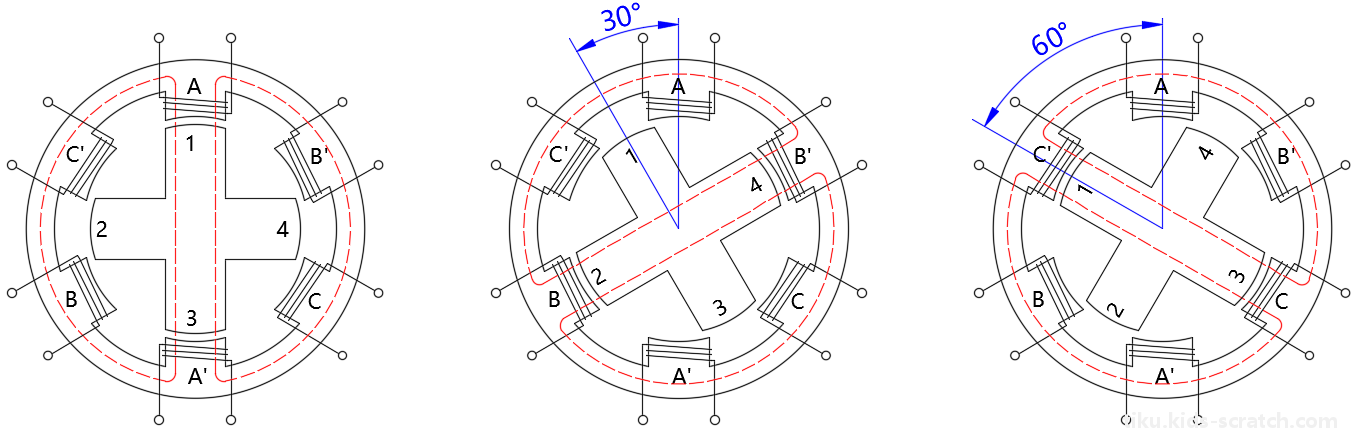
15度
30度
45度
60度
ESP32主控板和MPU6050姿态传感器通过I2C进行数据交互,发起数据传送的是?
ESP32主控板
MPU6050姿态传感器
ESP32主控板和MPU6050姿态传感器按需发起
ESP32主控板和MPU6050姿态传感器同时发起
有关TCP/IP协议下列说法正确的有哪些?
TCP/IP协议是一系列协议家族的统称;
TCP/IP协议包含了TCP协议和IP协议;
TCP/IP四层模型分别是:应用层、网络层、传输层、网络接口层;
TCP/IP协议当前Internet的基础协议。
ESP32 for Arduino的HTTP类库提供HTTP请求的方法有哪些?
GET
PUT
HEAD
PATCH
通常情况下,下列选项中,PID控制器不采用的控制方式有哪些?
P控制
I控制
D控制
ID控制
步进电机的结构组成有哪些?
定子
转子
电机轴
绕组
下列有关SPI通信描述正确的是有哪些?
SPI是异步通信
SPI是全双工通信
SPI是串行通信
SPI通信中,数据发送和接受是在同一个时钟周期内完成的
Web服务采用的是请求/相应模式。
正确
错误
SPI通信中,主机和从机通信时,片选SS引脚处于低电平。
正确
错误
当ESP32主控板工作在AP模式时,其它ESP32主控板可连接到该ESP32主控板。
正确
错误
PID控制器中,P控制会产生稳态误差。
正确
错误
I2C通信和UART通信都是串行通信。
正确
错误