ESP32 for Arduino, ESP32主控板以AP模式创建Web服务器,SSID为“AA”,密码为“BB”,下列选项中,部分初始化程序正确的是?( )



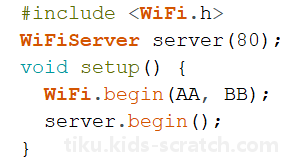
ESP32 for Arduino,客户端向服务器端发送查询数据HTTP请求,所对应的方法是?( )
GET
PUT
POST
PATCH
关于ESP32 for Arduino I2C类库成员函数available()的功能,下列描述正确的是?( )
从接收缓冲区中接收数据
判断当前连接是否可用
将从设备的地址加入到发送数据队列
返回接收缓冲区的字节数
局域网下本机的IP地址是192.168.20.250,网络上另一台设备的IP地址是192.168.20.251,使用ping命令在本机上查看两台设备是否网络连通,下列选项中,正确的命令是?( )
ping 192.168.20.250
ping 192.168.20.251
ping 192.168.20.250 192.168.20.251
ping 192.168.20.251 192.168.20.250
下图所示的SPI外设原理图中,时钟数据线对应的是?( )
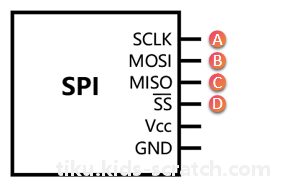
A
B
C
D
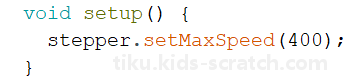
步进电机类库AccelStepper的成员函数中,用于设定步进电机最大允许转速的成员函数是?( )
AcceISetpper.runSpeed()
AcceISetpper.setSpeed()
AcceISetpper.setCurrentPosition()
AcceISetpper.setMaxSpeed()
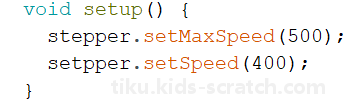
使用步进电机类库AccelStepper,通过ULN2003控制24BJY48步进电机转动,下列所示程序中,用于初始化设置步进电机以恒定转速400转动的程序是?( )


ESP32 主控板向一个I2C接口的外设模块写入数据,部分程序如下,程序中A/B/C分别是?( )

外设模块的地址/写入的数据内容/模块的寄存器地址
外设模块的地址/模块的寄存器地址/写入的数据内容
模块的寄存器地址/外设模块的地址/写入的数据内容
模块的寄存器地址/写入的数据内容/外设模块的地址
ESP32 for Arduino 提供的WiFi类库的成员函数中,用于设定ESP32主控板为STA模式的成员函数是?( )
WiFi.begin()
WiFi.softAP()
WiFi.localIP()
WiFi.softAPIP()
TCP/IP四层模型,从本机向外部发送网络数据时,数据在本机的传送顺序是?( )
应用层→传输层→网络层→网络接口层
网络接口层→网络层→传输层→应用层
应用层→网络层→传输层→网络接口层
网络接口层→传输层→网络层→应用层
使用ESP32 for Arduino SPI类库,下列选项中,用于初始化SPI接口的成员函数是?( )
SPI.begin()
SPI.setBitOrder()
SPI.setFrequency()
SPI.setup()
使用ESP32 for Arduino I2C类库,下列选项中,当主设备向从设备发送读取数据请求时,对应的成员函数是?( )
Wire.read()
Wire.write()
Wire.requestFrom()
Wire.beginTransmission()
下列选项中,属于URL的是?( )
192.168.1.10
www.baidu.com
http://www.kpcb.org.cn/h-col-147.html
fe80::7998:ffc8:9c62:f181
下列选项中,关于IPV4说法错误的是?( )
IPV4的地址长度是32位
IPV4的地址分为4段
IPV4地址各段用"."隔开
IPV4地址使用16进制数表示
I2C串行通信的两根数据线中,用于发送数据信号的是?( )
SDA
SCL
MOS
MISO
ESP32 for Arduino SPI类库,关于成员函数transfer()的功能,下列描述正确的是?( )
设置数据的传送方式
发送一个字节的数据,同时接收一个字节的数据
发送时钟数据
启动SPI通信事务
关于MPU6050姿态传感器,下列描述错误的是?( )
MPU6050是一个九轴传感器
MPU6050集成了三轴陀螺仪
MPU6050集成了三轴加速度计
MPU6050集成了数字运动处理器
下图是三相反应式步进电机连续节拍工作示意图,图示所对应的工作方式为?( )
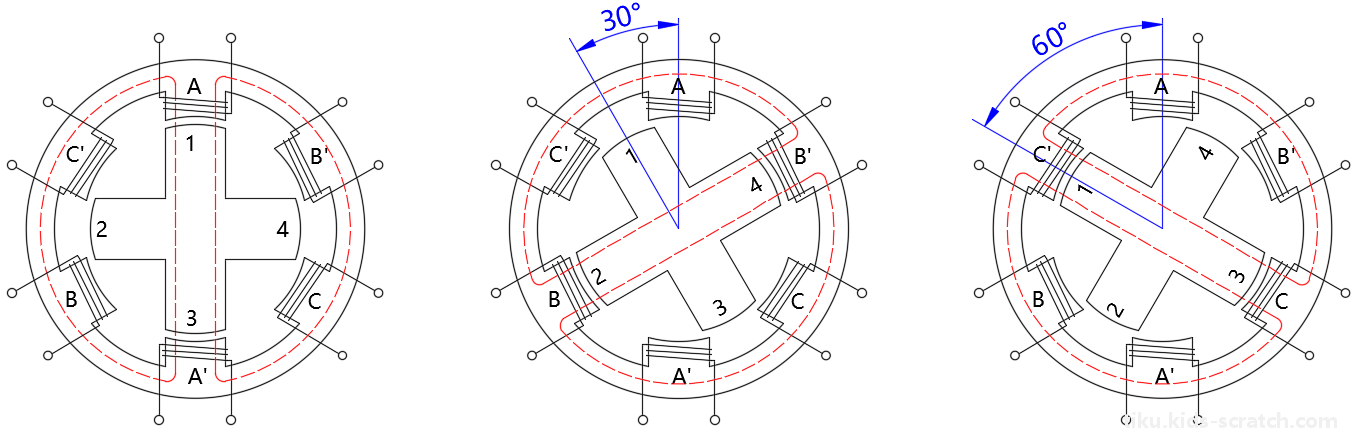
三相单三拍
三相单六拍
三相双三拍
三相单双六拍
2024年初,OpenAI发布了文生视频人工智能生成模型,该模型的名称是?( )
ChatGPT
DALL-E
AIphaZero
Sora
HTML文档由标签和文本内容组成,下列选项中,用于标记网页开始的标签是?( )
<title>
<head>
<body>
<html>
下列选项中,用于表示计算机在互联网上的标识符的有?( )
域名
IP地址
URL
TCP协议
MPU6050姿态传感器是比较典型的MEMS传感器,MEMS传感器的优点有?( )
体积很小
质量很轻
耐用性好
性能稳定
下列选项中,有关I2C描述正确的有?( )
I2C通信是串行、同步、半双工通信
I2C通信采用主从模式
I2C通信由主设备发起
I2C通信时,从设备有唯一的地址
当在计算机上浏览网页时,下列选项所列协议中,使用到的有?( )
HTTP协议
TCP协议
UDP协议
IP协议
PID控制器是比例-积分-微分控制器的简称,下列选项中,常用的PID控制器有?( )
P控制
PI控制
PD控制
PID控制
计算机通过WiFi连接到ESP32主控板,此时ESP32主控板工作于STA模式。( )
正确
错误
SPI通信的时钟模式有四种选择。( )
正确
错误
TCP/IP协议指的是TCP协议和IP协议。( )
正确
错误
PID控制器中的微分控制主要作用是消除振荡。( )
正确
错误
I2C通信时,可同步发送和接受数据。( )
正确
错误