下图是三相反应式步进电机工作示意图,当采用单双六拍通电方式运转时,其步距角是?
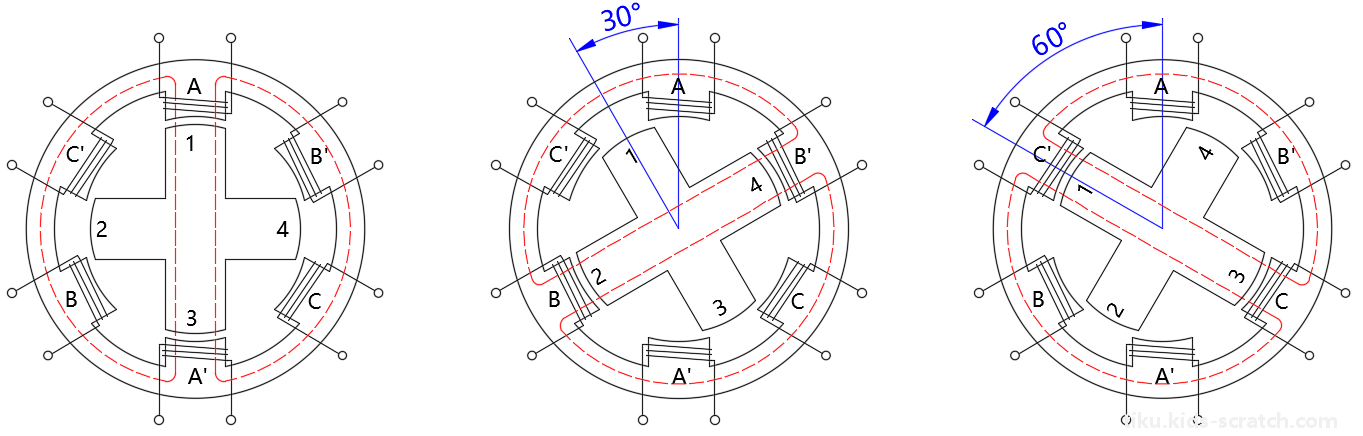
15度
30度
45度
60度
TCP/IP协议中,主机提供不同的网络服务,区分不同网络服务是通过?
IP地址
端口
端口+IP地址
IP地址+端口
I2C串行通信总线空闲时,SDA和SCL的电平状况分别是?
高电平,低电平
低电平,高电平
均为低电平
均为高电平
MPU6050姿态传感器中,获取角速度的传感器单元是?
Accelerator
Gyroscope
DMP
I2C
ESP32 for Arduino的SPI类库的成员函数中,SPI.setBitOrder()的作用是?
初始化SPI接口
设置数据在串行总线上的传送方式
设置数据在串行总线上的传送时钟频率
设置时钟模式
在TCP/IP通信中,率先发起通信请求的是?
主设备
从设备
服务器
客户端
MPU6050姿态传感器加速度传感器单元可以设置如下不同的量程,其中测量精度最高的量程是?
±2g
±4g
±8g
±16g
TCP/IP四层模型从底向上,依次是?
应用层、网络层、传输层、网络接口层
应用层、传输层、网络层、网络接口层
网络接口层、网络层、传输层、应用层
网络接口层、传输层、网络层、应用层
下列标签中表示主体开始的标签是?
<html>
<head>
<title>
<body>
客户端发送HTTP请求时,常用的方法是?
GET
PUT
POST
PATCH
MPU6050姿态传感器获取的原始数据是( )位的有符号整数。
8位
16位
32位
64位
PID控制中P控制是指?
比例控制
积分控制
微分控制
闭环控制
SPI通信中,主机和从机通信时,片选SS引脚为?
上升沿
下降沿
高电平
低电平
I2C串行通信,SDA引脚的作用是?
传送时钟信号
传送数据信号
同时传送时钟和数据信号
仅用于发送数据信号
MPU6050姿态传感器测得的姿态角中,偏航角是?
Pitch
Yaw
Roll
DMP
IPV6地址长度的位数是?
16
32
64
128
ESP32 for Arduino的I2C类库的成员函数中,Wire.begin()的作用是?
用于主设备初始化I2C连接
将向从机发送的数据加入到发送数据队列
返回缓冲区中数据的字节数
指定将要进行数据通信的从设备地址
ESP32 for Arduino 提供的WiFi类库的成员函数中,用于设定为AP模式的成员函数是?
WiFi.begin()
WiFi.softAP()
WiFi.localIP()
WiFi.softAPIP()
可获取本机电脑IP地址的命令为?
ipconfig
msconfig
ping
dir
SPI通信中,主机向从机发送数据的数据线为?
SCLK
MOSI
MISO
SS
关于I2C通信,下列说法正确的是?
I2C串行通信上的设备有主从之分。
I2C通信是串行通信。
I2C通信中从设备都有一个唯一的地址。
I2C通信是一种半双工通信方式。
关于SPI串行通信,信号引脚分别包含?
SCLK
MOSI
MISO
SS
在浏览器中,输入如下数据,可以访问到网页的是?
域名
IP地址
统一资源定位符URL
端口号
以下属于全双工串行通信的有?
UART
I2C
SPI
蓝牙通信
关于I2C串行通信,数据线分别包含?
SDA
SCL
GND
VCC
TCP/IP协议是一组协议的统称。
正确
错误
ping命令用于检测当前计算机的网络配置。
正确
错误
步进电机运转时,会产生误差累计。
正确
错误
MPU6050姿态传感器返回的数值不需经过数据融合处理,即可直接使用。
正确
错误
步进电机转动的速度与脉冲频率成正比。
正确
错误